Frequently Asked Questions
How does one implement motion detection using navX-Sensor technology?
Detecting motion/no-motion can be simply detected by determining if a body’s linear acceleration exceeds a small threshold.
Using the data directly from accelerometers, this is not as easy as it seems, since raw accelerometer readings contain both acceleration due to gravity as well as acceleration due to a body’s motion. One method for detecting motion with raw acceleration data is to use a high-pass filter, which lets quickly-changing information through but blocks information that doesn’t change frequently.
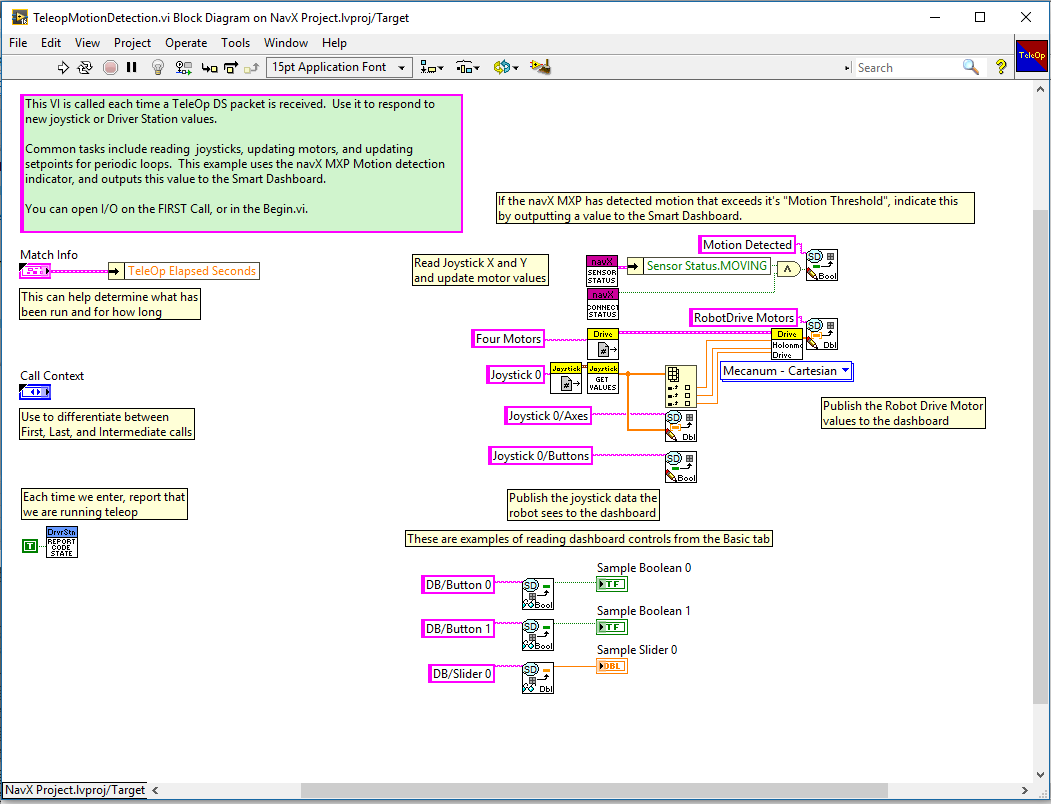
However, a more comprehensive and reliable approach is to subtract the acceleration due to gravity from the raw acceleration values. The result value is known as “world linear acceleration”, representing the actual amount of acceleration due to motion, and is calculated automatically by navX MXP’s motion processor. Whenever the sum of the world linear acceleration in both the X and Y axes exceeds a “motion threshold”, motion is occurring.
Full Java Source Code
Full LabVIEW Source code on Github
Using the data directly from accelerometers, this is not as easy as it seems, since raw accelerometer readings contain both acceleration due to gravity as well as acceleration due to a body’s motion. One method for detecting motion with raw acceleration data is to use a high-pass filter, which lets quickly-changing information through but blocks information that doesn’t change frequently.
However, a more comprehensive and reliable approach is to subtract the acceleration due to gravity from the raw acceleration values. The result value is known as “world linear acceleration”, representing the actual amount of acceleration due to motion, and is calculated automatically by navX MXP’s motion processor. Whenever the sum of the world linear acceleration in both the X and Y axes exceeds a “motion threshold”, motion is occurring.
FRC C++ Example
Full C++ Source CodeFRC Java Example
Full Java Source Code
FRC LabView Example
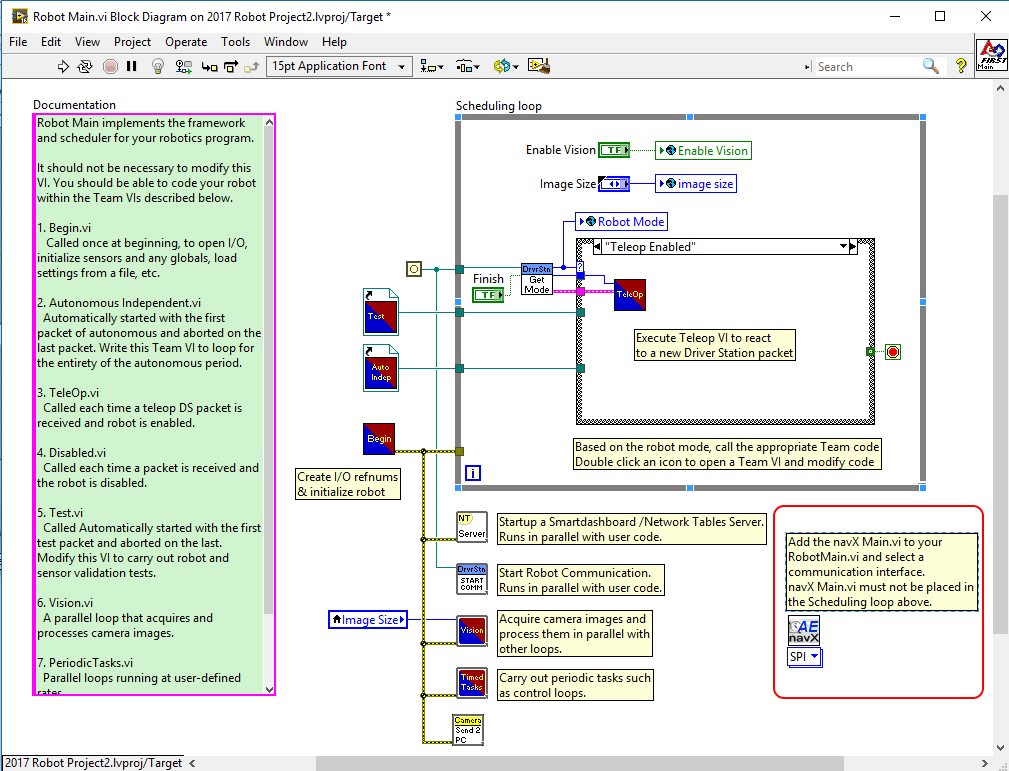
The navX-MXP AutoBalance LabView example shows how to make small modifications to the LabView “FRC RoboRIO Robot Project” using the “Mecanum Robot” configuration to detect when your robot is moving.RobotMain.vi
Place the NavX main vi on the block diagram and set it up to your needs. The default sample rate is 50Hz. You may need to process faster for your situation. For the SPI, I2C and USB connections the max sample rate is 200Hz.Teleop.vi
The Teleop.vi is modified to detect when the robot has motion.Full LabVIEW Source code on Github
Last Updated 7 years ago